Efficient methods for multibody dynamics
Multibody system dynamics is a branch of Mechanics that deals with the simulation and analysis of mechanical systems. For the vast majority of the mechanical applications of interest, this has to be carried out with the help of computers, because of the complexity of the equations involved.
A wide variety of industrial applications benefit from multibody system dynamics algorithms, including virtual prototyping, machine and mechanism design, real-time simulators, haptic systems, and many more. For instance, multibody dynamics simulation can be used to predict the behaviour of heavy machinery before it is built, making it possible to optimize the initial design, arriving at a better final product while reducing the time and expenses invested in the development process.
My research aims at finding new methods and algorithms, and improving existing ones, to keep on pushing forward the boundaries of the problems that can be effectively addressed with multibody dynamics. Some of the specific research topics on which I have worked in this field include efficient implementations and parallelization methods, mechanical systems with redundant constraints, non-holonomic systems, problems with singular configurations, linearization techniques, and sensitivity analysis.
I am also interested in benchmarking multibody solution methods and contribute regularly to the IFToMM Library of Computational Benchmark Problems.
Co-simulation
Many engineering applications are so complicated that they cannot be simulated using a single software tool. Sometimes, the system under study is made up of components with different characteristics: for instance, a car contains mechanical parts, hydraulics, electronics, and sensors, among several other elements; these have different physical behaviours and time scales. Co-simulation consists in coupling different solver tools to carry out the simulation of complex engineering systems. This way, each solver can be tailored to the requirements of a particular subsystem.
Coordinating different solver tools in a co-simulation scheme requires the design of appropriate synchronization algorithms to make the process efficient and stable. The goal of my research on this field is the development of such algorithms, as well as the definition of methods to keep co-simulation stable in demanding applications, such as those that require real-time execution.
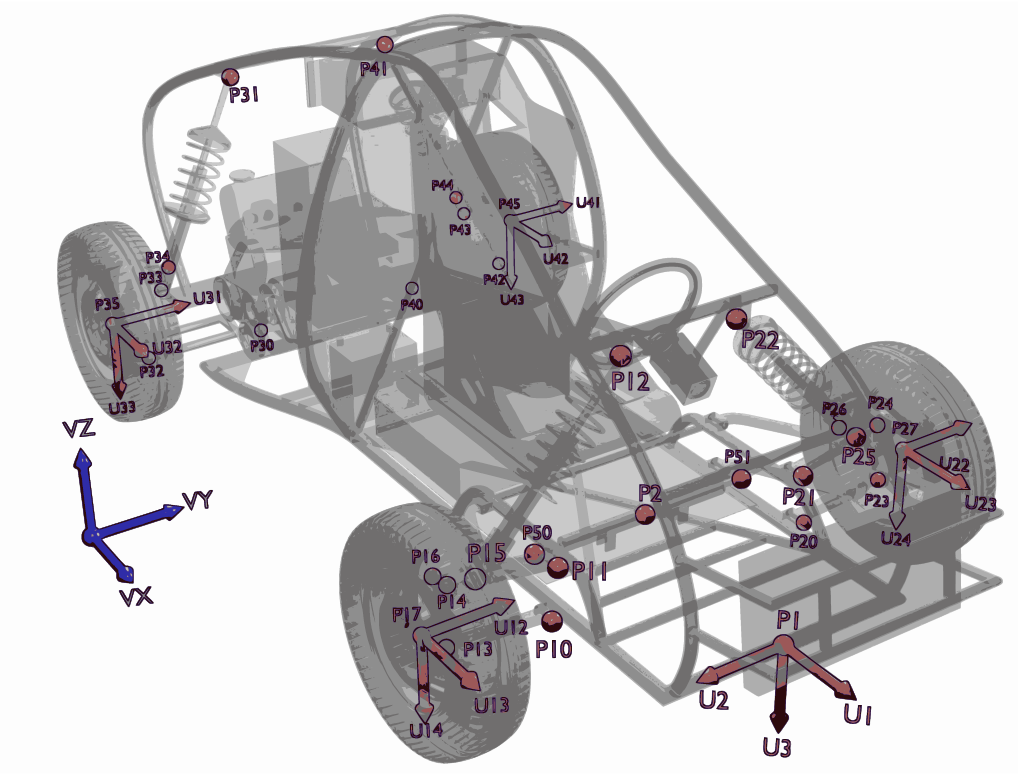
Mobile robotics
One of the many applications of multibody system dynamics is the design and optimization of mobile robots. Among these, planetary exploration vehicles (rovers) constitute a challenging and exciting research field. I have worked with the Applied Dynamics Laboratory at McGill University (Canada) in several projects aimed at characterizing the performance of these vehicles under extra-terrestrial mission conditions, improving their mobility, and providing guidelines for better design and operation. In this research, we have partnered with Canadian research institutions such as the Canadian Space Agency, MDA Space Missions, CM Labs Simulations, and the Aerospace Robotics Laboratory at Concordia University, with whom we participated in reduced gravity flights to test the effect of Martian gravity on the performance of rover wheels.
Some results of this line of research are summarized in the articles A Novel Concept for Analysis and Performance Evaluation of Wheeled Rovers and Mobility Evaluation of Wheeled Robots on Soft Terrain: Effect of Internal Force Distribution, published in Mechanism and Machine Theory in 2015 and 2016.

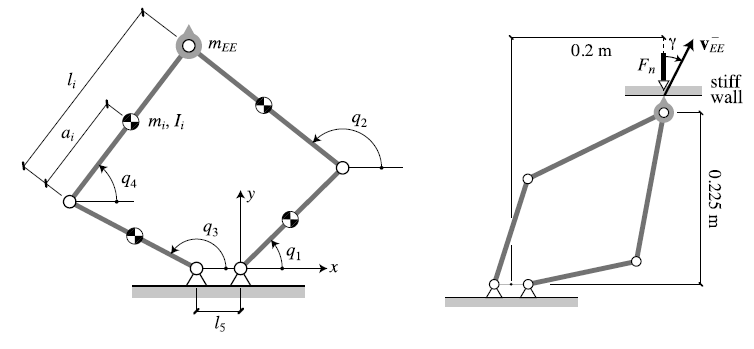
Non-smooth dynamics
A large number of mechanical systems undergo collisions. In many cases, the impact intensity can be decreased or increased by changing the configuration of the mechanism to maximize the value of appropriately defined indicators, as described in Load Assessment and Analysis of Impacts in Multibody Systems, a paper published in Multibody System Dynamics in 2016. This can be used to reconfigure a machine or vehicle prior to an impact, to reduce the forces at the contact and avoid damages. This approach was also used to study how the foot strike pattern affects the dynamics of human running and the way in which robot configuration affects obstacle negotiation of exploration rovers.
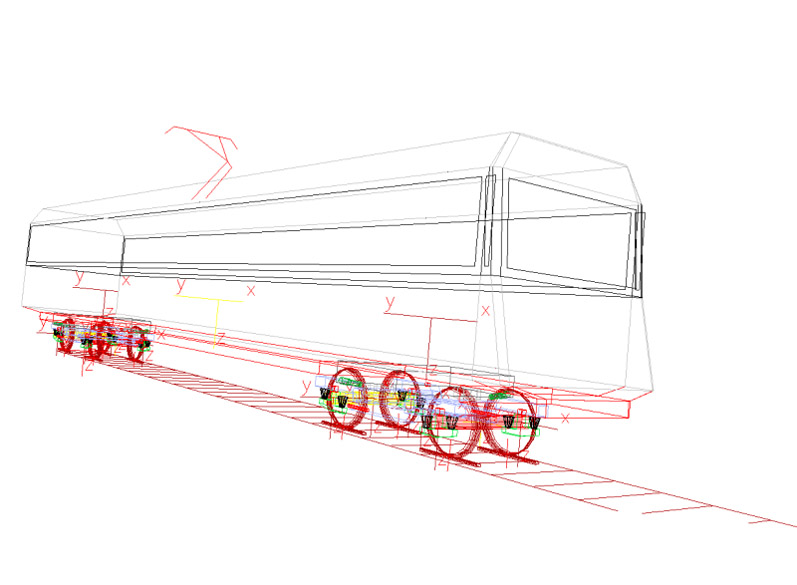
Railway dynamics
I worked in railway dynamics during my graduation project in Tecnun, the Technological Campus of the University of Navarra (Spain). I used multibody dynamics simulation to study how active steering (turning the vehicle wheels to enhance curve negotiation) can reduce rail corrugation, a kind of track wear that causes noise and vibration. The findings were published in a paper, Use of Active Steering in Railway Bogies to Reduce Rail Corrugation on Curves, in the Journal of Rail and Rapid Transit, 2007.