Contenido
Proyectos
Novedades
 Acceso restringido
Acceso restringido
|
Investigación
Líneas de Investigación
Dinámica de sistemas multicuerpo
El Laboratorio de Ingeniería Mecánica (LIM) está especializado en la simulación por ordenador de sistemas mecánicos móviles, que se basa en la disciplina conocida como dinámica de sistemas multicuerpo. La investigación básica en esta disciplina es siempre una línea del laboratorio, ya que no existe un método que permita resolver todos los problemas, sino que cada nuevo problema suele presentar peculiaridades que requieren nueva investigación. Así, es esencial contemplar los distintos componentes del método de manera integral, ya que cada uno de ellos influye en los demás: modelización, elección de coordenadas, formulación de las ecuaciones del movimiento, integración numérica, programación. El desafío es tanto mayor cuanto mayor es el detalle requerido en el modelo (flexibilidad de los elementos, fenómenos de contacto e impacto, control, multifísica -electricidad, hidráulica, termodinámica, etc.-) o cuando se abordan problemas de optimización.
La dinámica de sistemas multicuerpo encuentra aplicación en todos aquellos sectores que presenten sistemas mecánicos móviles. El LIM se centra en aplicaciones prácticas en los campos de automoción, biomecánica, maquinaria y marítimo. La simulación por ordenador se complementa con el desarrollo de prototipos físicos y la experimentación cuando los proyectos así lo requieren.
A continuación, se enumeran aplicaciones en las que trabaja o ha trabajado el LIM en los sectores mencionados:
 |
Automoción
- Modelos multicuerpo de vehículos
- Observadores de estados, fuerzas y parámetros basados en modelos multicuerpo de vehículos: sensores virtuales
- Monitorización de vehículos
- Controladores de vehículos
- Gemelos digitales de vehículos o componentes
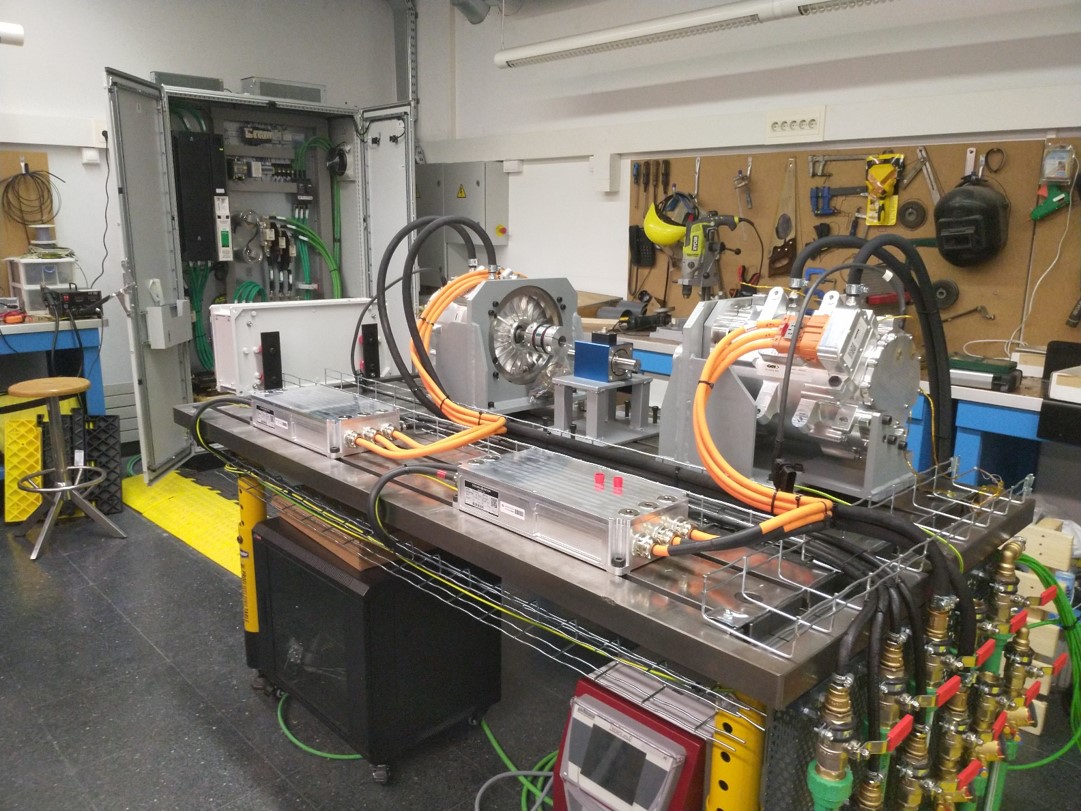
- Bancos de ensayos de componentes
- Simulación de ensayos reales
|
 |
Biomecánica
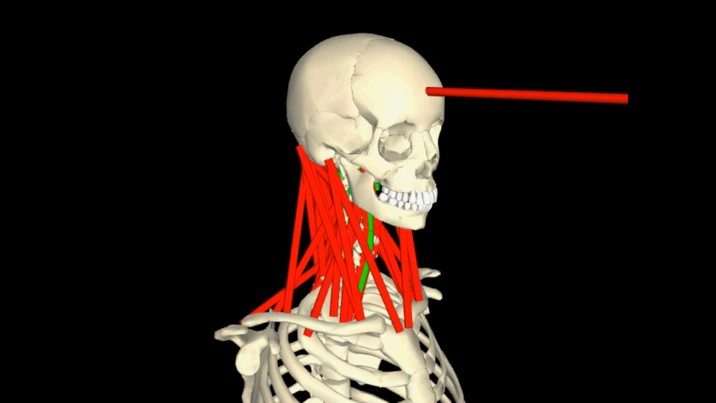
- Modelos multicuerpo completos o parciales del cuerpo humano, a nivel esquelético, músculo-esquelético, o neuro-músculo-esquelético
- Análisis del movimiento humano y animal
- Análisis de exoesqueletos
- Órtesis activas para asistencia a la marcha
- Sensorización biomecánica
|
 |
Maquinaria
- Simuladores de excavadoras
- Simuladores de grúas
- Simuladores de carretillas elevadoras
- Simuladores de ...
|
 |
Marítimo
- Simulación del comportamiento de redes de pesca y aparejos en el mar
- Ensayos de redes de pesca
- Simulación de maniobras en buques de superficie o submarinos
- Simulación de sistemas de aprovechamiento de energía marina
|
Códigos UNESCO, de acuerdo con la nomenclatura estándard internacional para áreas de ciencia y tecnología
(Documento UNESCO NS/ROU/257 REV.1; SC.88/WS/80):
| Códigos UNESCO | Descripción |
|---|
| 1203.09 | Diseño Asistido por Computador |
| 1203.10 | Enseñanza Asistida por Computador |
| 1203.25 | Diseño de Sistemas Sensores |
| 1203.26 | Simulación |
| 1206.01 | Construcción de Algoritmos |
| 2205.01 | Mecánica Analítica |
| 2205.02 | Mecánica de Medios Continuos |
| 2205.03 | Elasticidad |
| 2205.07 | Medida de Propiedades Mecánicas |
| 2205.09 | Mecánica de Sólidos |
| 3304.11 | Diseño de Sistemas de Cálculo |
| 3304.17 | Sistemas en Tiempo Real |
| 3305.32 | Ingeniería de Estructuras |
| 3313.15 | Diseño de Máquinas |
Publicaciones
Algunos documentos están disponibles en formato Portable Document Format (PDF).
Los ficheros PDF pueden ser visualizados con el software Adobe Acrobat Reader.

Propiedad Intelectual
Estancias
| Miembro |
Destino |
Tutor |
Duración |
| Manuel Gonzalez |
Universidad Politecnica de Madrid (Spain) |
Javier Garcia de Jalon |
07/2001 - 09/2001 |
| Manuel Gonzalez |
University of Illinois at Chicago (USA) |
Ahmed A. Shabana |
07/2002 - 09/2002 |
| Daniel Dopico |
Universidad Politecnica de Madrid (Spain) |
Juan Carlos Garcia Orden |
01/2004 - 05/2004 |
| Urbano Lugris |
Universidad de Sevilla (Spain) |
Juana Mayo |
01/2005 - 03/2005 |
| Daniel Dopico |
Politecnico di Milano (Italy) |
Carlo Bottasso |
10/2005 - 12/2005 |
| Urbano Lugris |
Universität Stuttgart (Germany) |
Peter Eberhard |
04/2006 - 06/2006 |
| Francisco Gonzalez |
Lappeenranta U. of Tech. (Finland) |
Aki Mikkola |
08/2007 - 10/2007 |
| Alberto Luaces |
Transilvania University of Brasov (Romania) |
Doru Talaba |
04/2009 - 06/2009 |
| Francisco Gonzalez |
Rensselaer Polytechnic Institute (USA) |
Kurt Anderson |
08/2009 - 09/2009 |
| Roland Pastorino |
Universita degli Studi di Padova (Italy) |
Alberto Trevisani |
11/2010 - 02/2011 |
| Alberto Luaces |
University of Wisconsin-Madison (USA) |
Dan Negrut |
07/2013 - 08/2013 |
| Amelia de la Prada |
IFREMER (France) |
Daniel Priour |
09/2013 - 11/2013 |
| Daniel Dopico |
Virginia Tech (USA) |
Adrian & Corina Sandu |
07/2012 - 12/2013 |
| Francisco Gonzalez |
McGill University (Canada) |
Jozsef Kovecses |
07/2010 - 08/2014 |
| Urbano Lugris |
University Duisburg-Essen (Germany) |
Andres Kecskemethy |
06/2014 - 09/2014 |
| Roland Pastorino |
KU Leuven (Belgium) |
Wim Desmet |
09/2012 - 05/2015 |
| Emilio Sanjurjo |
TU Delft (The Netherlands) |
Arend Schwab |
02/2015 - 05/2015 |
| David Vilela |
Universität Bremen (Germany) |
Gabriel Zachmann |
02/2017 - 04/2017 |
| Antonio Rodriguez |
KU Leuven (Belgium) |
Wim Desmet |
01/2017 - 05/2017 |
| Francisco Mouzo |
Hamburg University of Technology (Germany) |
Robert Seifried |
04/2017 - 06/2017 |
| Francisco Gonzalez |
McGill University (Canada) |
Jozsef Kovecses |
07/2017 - 04/2018 |
| Florian Michaud |
Rice University (USA) |
Benjamin J. Fregly |
03/2018 - 07/2018 |
| Daniel Dopico |
Virginia Tech (USA) |
Adrian & Corina Sandu |
06/2018 - 09/2018 |
| Antonio Rodriguez |
Siemens Industry Software (Belgium) |
Roland Pastorino |
07/2018 - 09/2018 |
| Francisco Gonzalez |
McGill University (Canada) |
Jozsef Kovecses |
09/2018 - 10/2018 |
| Francisco Gonzalez |
Siemens Industry Software (Belgium) |
Roland Pastorino |
07/2019 - 08/2019 |
| Borja Rodriguez Frade |
Universita degli Studi di Padova (Italy) |
Alberto Trevisani |
01/2021 - 04/2021 |
| Alvaro Lopez Varela |
Universite de Liege (Belgium) |
Olivier Bruls |
08/2021 - 10/2021 |
| Sarath K. Karumathil |
Technical University of Denmark (Denmark) |
Barry O'Neill |
09/2021 - 12/2021 |
| Francisco Bottero |
Universita degli Studi di Parma (Italy) |
Alessandro Tasora |
09/2022 - 12/2022 |
| Ánxela Pérez Costa |
The Open University (UK) |
Anna De Liddo |
04/2024 - 06/2024 |
| Florian Michaud |
Western Health Hospital, Melbourne (Australia) |
Simon Talbot |
09/2025 - 10/2025 |
Financiación
|
