Research
Research lines
Multibody system dynamics
The Mechanical Engineering Laboratory (LIM) is specialized in the computer simulation of mobile mechanical systems, which is based on the discipline known as multibody system dynamics. Basic research in this discipline is always a line of the laboratory, since there is no method that allows all problems to be solved, but each new problem usually presents peculiarities that require new research. Thus, it is essential to contemplate the different components of the method in an integral way, since each one of them influences the others: modeling, choice of coordinates, formulation of the equations of motion, numerical integration, programming. The challenge is greater the greater the detail required in the model (flexibility of the elements, contact and impact phenomena, control, multiphysics -electricity, hydraulics, thermodynamics, etc.-) or when optimization problems are addressed.
Multibody system dynamics finds application in all those sectors that present mobile mechanical systems. The LIM focuses on practical applications in the automotive, biomechanical, machinery, and maritime fields. Computer simulation is complemented by the development of physical prototypes and experimentation when the projects so require.
Listed below are applications in which the LIM works or has worked in the sectors mentioned:
 |
Automotive
|
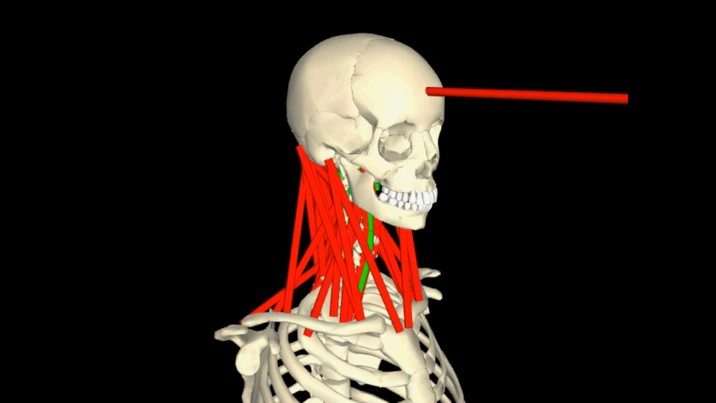 |
Biomechanics
|
 |
Machinery
|
 |
Maritime
|
UNESCO codes, according to the proposed international standard nomenclature for fields of science and technology (UNESCO document NS/ROU/257 REV.1; SC.88/WS/80):
| UNESCO Codes | Description |
|---|---|
| 1203.09 | Computer Aided Design |
| 1203.10 | Computer Aided Teaching |
| 1203.25 | Sensor System Design |
| 1203.26 | Simulation |
| 1206.01 | Algorithm Construction |
| 2205.01 | Analytical Mechanics |
| 2205.02 | Continuous means mechanics |
| 2205.03 | Elasticity |
| 2205.07 | Measurement of Mechanical Properties |
| 2205.09 | Solid Mechanics |
| 3304.11 | Calculation System Design |
| 3304.17 | Real time systems |
| 3305.32 | Structures Engineering |
| 3313.15 | Machine Design |
Publications
Some documents are available in Portable Document Format (PDF) format. PDF files can be viewed and printed by using Adobe’s Acrobat Reader software.

Intellectual Property
Research visits
| Member | Destination | Advisor | Duration |
|---|---|---|---|
| Manuel Gonzalez | Universidad Politecnica de Madrid (Spain) | Javier Garcia de Jalon | 07/2001 - 09/2001 |
| Manuel Gonzalez | University of Illinois at Chicago (USA) | Ahmed A. Shabana | 07/2002 - 09/2002 |
| Daniel Dopico | Universidad Politecnica de Madrid (Spain) | Juan Carlos Garcia Orden | 01/2004 - 05/2004 |
| Urbano Lugris | Universidad de Sevilla (Spain) | Juana Mayo | 01/2005 - 03/2005 |
| Daniel Dopico | Politecnico di Milano (Italy) | Carlo Bottasso | 10/2005 - 12/2005 |
| Urbano Lugris | Universität Stuttgart (Germany) | Peter Eberhard | 04/2006 - 06/2006 |
| Francisco Gonzalez | Lappeenranta U. of Tech. (Finland) | Aki Mikkola | 08/2007 - 10/2007 |
| Alberto Luaces | Transilvania University of Brasov (Romania) | Doru Talaba | 04/2009 - 06/2009 |
| Francisco Gonzalez | Rensselaer Polytechnic Institute (USA) | Kurt Anderson | 08/2009 - 09/2009 |
| Roland Pastorino | Universita degli Studi di Padova (Italy) | Alberto Trevisani | 11/2010 - 02/2011 |
| Alberto Luaces | University of Wisconsin-Madison (USA) | Dan Negrut | 07/2013 - 08/2013 |
| Amelia de la Prada | IFREMER (France) | Daniel Priour | 09/2013 - 11/2013 |
| Daniel Dopico | Virginia Tech (USA) | Adrian & Corina Sandu | 07/2012 - 12/2013 |
| Francisco Gonzalez | McGill University (Canada) | Jozsef Kovecses | 07/2010 - 08/2014 |
| Urbano Lugris | University Duisburg-Essen (Germany) | Andres Kecskemethy | 06/2014 - 09/2014 |
| Roland Pastorino | KU Leuven (Belgium) | Wim Desmet | 09/2012 - 05/2015 |
| Emilio Sanjurjo | TU Delft (The Netherlands) | Arend Schwab | 02/2015 - 05/2015 |
| David Vilela | Universität Bremen (Germany) | Gabriel Zachmann | 02/2017 - 04/2017 |
| Antonio Rodriguez | KU Leuven (Belgium) | Wim Desmet | 01/2017 - 05/2017 |
| Francisco Mouzo | Hamburg University of Technology (Germany) | Robert Seifried | 04/2017 - 06/2017 |
| Francisco Gonzalez | McGill University (Canada) | Jozsef Kovecses | 07/2017 - 04/2018 |
| Florian Michaud | Rice University (USA) | Benjamin J. Fregly | 03/2018 - 07/2018 |
| Daniel Dopico | Virginia Tech (USA) | Adrian & Corina Sandu | 06/2018 - 09/2018 |
| Antonio Rodriguez | Siemens Industry Software (Belgium) | Roland Pastorino | 07/2018 - 09/2018 |
| Francisco Gonzalez | McGill University (Canada) | Jozsef Kovecses | 09/2018 - 10/2018 |
| Francisco Gonzalez | Siemens Industry Software (Belgium) | Roland Pastorino | 07/2019 - 08/2019 |
| Borja Rodriguez Frade | Universita degli Studi di Padova (Italy) | Alberto Trevisani | 01/2021 - 04/2021 |
| Alvaro Lopez Varela | Universite de Liege (Belgium) | Olivier Bruls | 08/2021 - 10/2021 |
| Sarath K. Karumathil | Technical University of Denmark (Denmark) | Barry O’Neill | 09/2021 - 12/2021 |
| Francisco Bottero | Universita degli Studi di Parma (Italy) | Alessandro Tasora | 09/2022 - 12/2022 |
| Ánxela Pérez Costa | The Open University (UK) | Anna De Liddo | 04/2024 - 06/2024 |
| Florian Michaud | Western Health Hospital, Melbourne (Australia) | Simon Talbot | 09/2025 - 10/2025 |
| Santiago Beron | TU Delft (The Netherlands) | Ajay Seth | 03/2026 - 05/2026 |